Barometer/Magnetometer for Drone v1
This section is for advanced MiruMod owners that have a good undestanding of how MiruMod works internally.
For now MiruMod does not officially support barometer so please don't bother Miru with questions about it. Once the official support is released you'll surely be notified about it.
One of the differences between the AR.Drone v1.0 and the newer v2.0 is that the latter has built in barometer and magnetometer (compass). Barometer gives the information about altitude even above the 6m sonar range (so it can do the altitude hold even at high altitudes). Magnetometer gives you the information about the direction in which the Drone is flying which is needed e.g. for the Absolute Control Mode.
Although these sensors are missing in AR.Drone v1.0 for as little as 15$ USD it is possible to add them both to the MiruMod, and in future make use of them (e.g. for altitude hold very high above the ground or RTH).
The original idea of comes from happul3 who even wrote a prototype implementation of the sketch that uses the pressure sensor (you can find it HERE, additional details HERE, HERE and HERE).
Of course you can use the barometer/magnetometer module with Drone v2.0, but since it already has such components built in, this is a bit pointless excercise.
Hardware
There are many PCB designs with such sensors however one particularly interesting is called GY-651. It is tiny, contains BMP085 barometer and HMC5883L magnetometer and works well with Arduino's both 3.3V and 5V

You can buy these boards e.g. on ebay
All the instructions on this website will be referring to the GY-651 module
Connection diagrams for Arduino Nano and Pro Mini
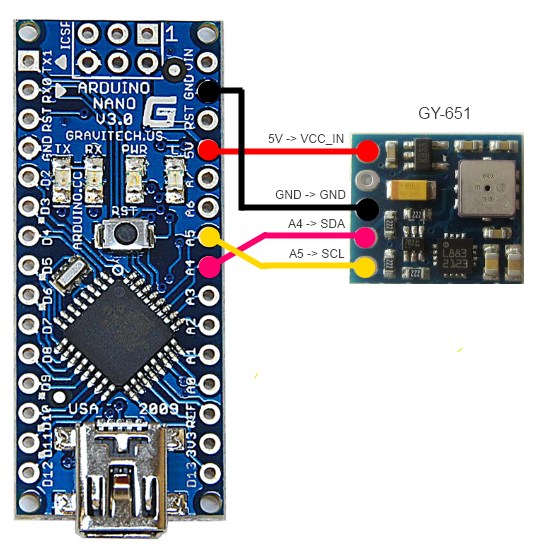
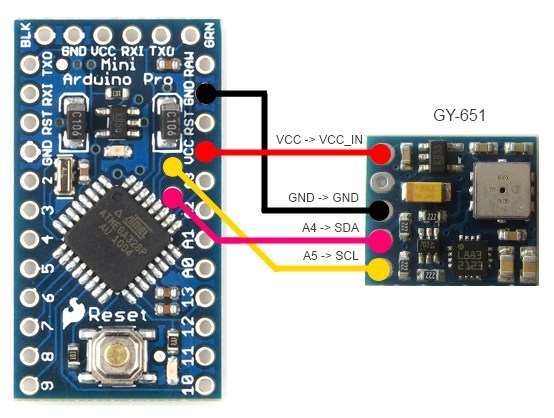
Click images to zoom.
Configuration
Starting from version 0.20 of the skech the support for barometer/magnetometer is built in. Please note that at this point the data is not used for anything but is written to the log. You can use the data in the sketch or the companion program, ideas are altitude stabilisation and/or compass for drone 1.
Following flags are used to enable/disable barometer/magnetometer support (both disabled by default)
#define EN_BMP 0 /* 1 for BMP085 support */
#define EN_HMC 0 /* 1 for HMC5883L support */
Note that if both are enabled the skech may become too big to fit into flash. In such case you have to disable automatic upload of companion program (change the #define AT2SO flag in sketch to 0) and load it to the drone manually.
If you like the MiruMod and would like to buy miru a beer or two for his great work you can do so using the PayPal "Donate" button below